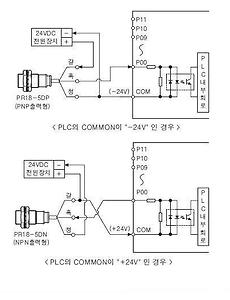
HardWare8 Seeeduino XIAO 아두이노 컨트롤러 SAMD21 Cortex M0+ 아두이노 IDE 설정 방법. https://files.seeedstudio.com/arduino/package_seeeduino_boards_index.json 2021. 3. 13. [라즈베리파이] 고정IP 설정 /etc/dhcpcd.conf 파일을 수정해야함 interface eth0static netmask=255.255.255.0static routers=192.168.20.1static domain_name_servers=168.126.63.1static ip_address=192.168.20.101 2018. 4. 4. NPN PNP 센서 PLC 연결 2017. 11. 9. ORCAD Layout Footprint padstack DRLDWG,DRILL : PIN지름 + 10mil TOP,BOTTOM,INNER : DRILL + 20mil PLANE : INNER + 10mil SMTOP,SMBOT : INNER + 5mil 2012. 3. 6. PIC32 Float <-> Byte[] 함수 UINT8 byte_array[4]; float f = 24234.0f; //some value memcpy( byte_array, &f, sizeof(f) ); UINT8 byte_array[4] = {0x00,0x54,0xbd,0x46}; float *fp=(float*)(&byte_array); float f2=*fp; 2011. 8. 22. PIC32 Delay 함수 #define FALSE 0 #define TRUE !FALSE #define FCY 72000000L #define FPB 36000000L #define WIDTH 1; #define REFRESH 20; #pragma config FPLLMUL = MUL_20, FPLLIDIV = DIV_2, FPLLODIV = DIV_1, FWDTEN = OFF #pragma config POSCMOD = HS, FNOSC = PRIPLL, FPBDIV = DIV_1 #define SYS_FREQ (80000000L) void Delayus( unsigned t) { T1CON = 0x8000; // enable TMR1, Tpb, 1:1 while (t--) { TMR1 = 0; while (TMR1 < FPB.. 2011. 7. 11. [AVR]IAR에서 sprintf 소수점 사용하기 xcl 파일을 수정해야한다.. atmega128 기준.. /* - lnkm128.xcl - * * XLINK command file for the ICCAVR C-compiler using the --cpu=m128, -ms * options. Segments are defined for an ATmega128 whithout external * memory. It is also possible to "add" external SRAM, EPROM and EEPROM. * * Usage: xlink your_file(s) -f lnkm128 * * File version: $Revision: 1.9 $ */ /*====================================================.. 2009. 9. 13. IAR EEPROM 변수 선언 __no_init __eeprom char erc_buf[KEYSU][eFULL+1]; __no_init __eeprom char *ep; 앞에 __no_init 를 붙여줘야된다.. 없을경우엔 Error[e133]: The output format intel-standard cannot handle multiple address spaces. Use format variants (-y -O) to specify which 이런 에러메세지를 만날수 있다. ROM-Output 파일 만들기위해선 Lingker에 ExtraOption-> -Ointel-extended,(XDATA)=.eep 을 삽입해주면 된다. 2009. 3. 6. 이전 1 다음